def wheel_over_dist(wp_past, wp_goal, wp_next_goal, wp_i, wp_i_max, R=10, F=5, eps_init=3, eps_max=20):
"""
This calculates 'eps', wheel over distance,
for updating waypoint considering the turning radius and change of course angle
- {wp_past, wp_goal, wp_next_goal}: waypoinsts to be used for calculation of theta
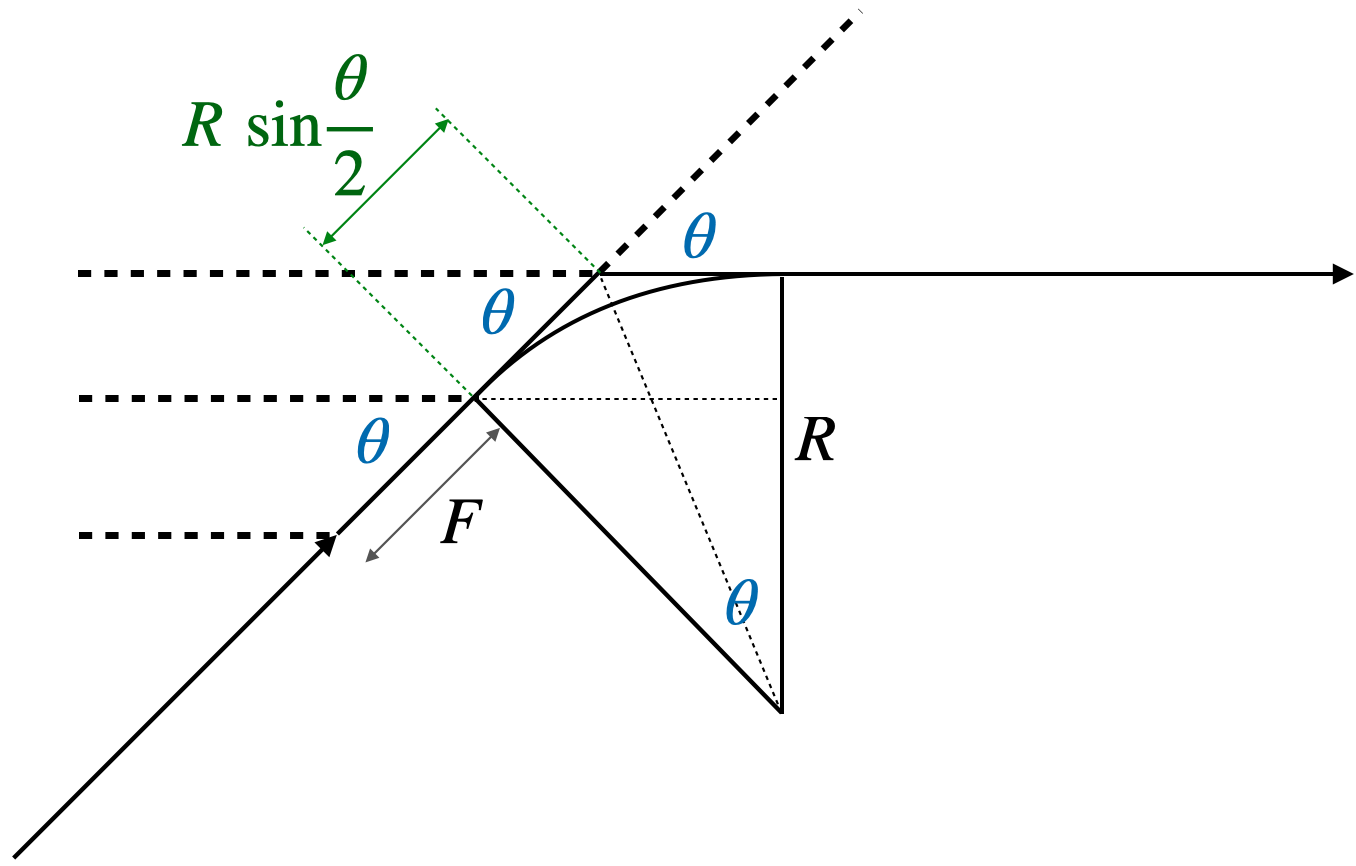
- eps = F + R * sin(theta/2), where
F = one ship's length [m]
w = rate of turn, [Rad.]
R = Radius of turn, and [m]
theta = change of course angle [Rad.]
"""
if wp_i == wp_i_max:
eps = eps_init # If current 'wp_goal' is the last waypoint
else:
theta = np.pi - ang_three_pt2(wp_past, wp_goal, wp_next_goal) # [Rad]
eps = F + R * np.sin(theta / 2)
eps = np.clip(eps, F, eps_max) # Clipping
return eps